Ayuda a Mara en su aventura marciana
Task eight. Debajo de las piedras negras puede haber agua.
Caso práctico
Parece que las aguas han vuelto a su cauce con Mara.
Durante dos semanas, los cuidados de Nico y Mili, y el descanso proporcionado a Mara, han dado sus frutos. Ahora está más tranquila y concentrada, trabajando igual que antes. No ha sido fácil. Incluso a Mili y a Nico, por turnos, les ha afectado el sueño. Se despertaban en medio de la noche y la acompañaban a ver las estrellas, que sabemos que es lo que más le gusta a Mara, superando poco a poco sus miedos y el trauma de quedarse sin batería.
En estos días, el trabajo para establecerse en la cueva avanzó mucho. Ya han elegido una sala principal como zona habitable donde establecerán el campamento. En otras salas han decidido construir laboratorios, zonas de trabajo, zonas de almacenamiento... Hasta hay prevista una zona deportiva.
Pero hay una sala en la cueva especial. Nico hizo algunas investigaciones y está convencido de que un acuífero de agua líquida pasa a algunos metros de profundidad del suelo, y el agua, por capilaridad, rezuma en ciertos puntos hasta casi alcanzar la superficie de la cueva. No hay ningún indicio del líquido hasta que se excava y el agua brota naturalmente.
Sin embargo, tiene una sospecha. Al iluminar bien la sala se dio cuenta que la superficie del suelo está compuesta en su mayor parte por piedras. La inmensa mayoría de ellas son de color claro. Pero salpicadas aquí y allá hay montoncitos de piedras casi negras. Está convencido de que el agua rezuma por donde se acumulan las piedras negras... Algún tipo de reacción química (que aún tiene que investigar) hará que las piedras, al sentir la humedad del subsuelo, reaccionen y cambien de color.
Así que... ¡vuelta al trabajo, Mara! Nico le ha encargado a Mara que mapee el suelo de la cueva y encuentre todos los montoncitos de piedras negras.
Actividad de lectura
Accede a esta página web y lee el artículo:
- Lectura detallada del contenido del artículo.
- Responde a estas preguntas:
- A lo largo del año marciano, ¿todo el año aparece el agua en su superficie?
- Si existe agua en Marte, ¿quiere decir que hay vida - microbiana al menos - en Marte?
- El agua de marte tiene un origen... ¿Subterráneo o atmosférico?
- En el pasado... ¿Hubo agua líquida y abundante en Marte?
Tablero de la práctica cuentamanchas.
A modo de ejemplo, se presentan tres documentos del mismo tablero:
- Versión en A3, circuito_manchas.pdf
- Versión en imagen vectorial svg (inkscape), circuito_manchas.svg
- Versión en dos A4 para imprimir y pegar con cinta celo, CM_A4.pdf
NOTA: cualquier circuito o tablero imprimible tiene que tener un alto contraste entre el negro (mate) y el blanco (brillante).
Proceso para llevar a cabo la tarea
El sensor de infrarrojos
Sensores de infrarrojos
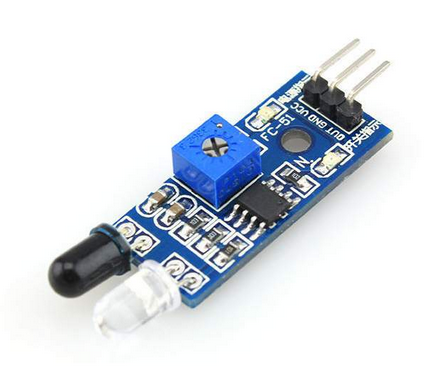

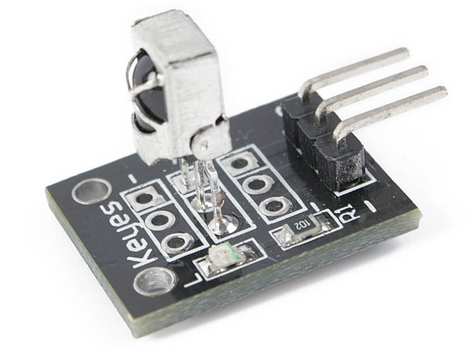
Principio de funcionamiento

Razona el algoritmo (detectando)
Para llegar a hacer este programa necesitas razonar el algoritmo. ¿Qué tal si diseñas un diagrama de flujo?
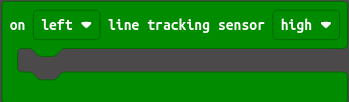
Detección de manchas (digital). Bloque makecode (micro:bit)
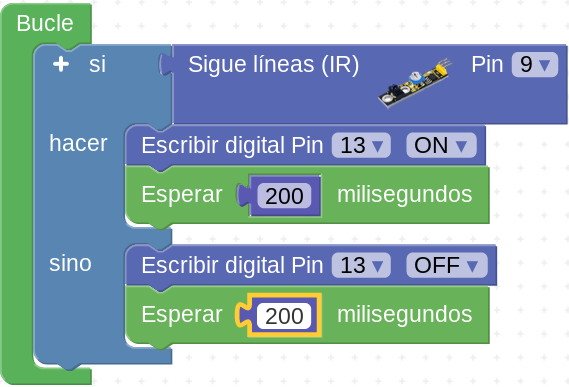
Detección de manchas (digital). Bloques en Arduinoblocks
Detección de manchas (digital). IDE Arduino
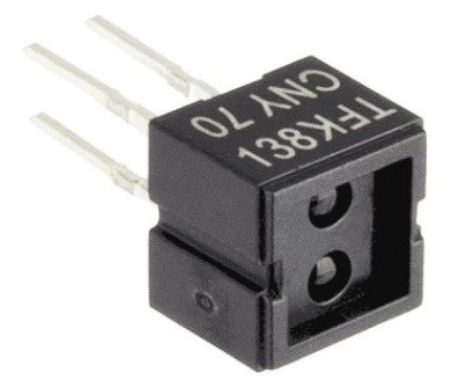
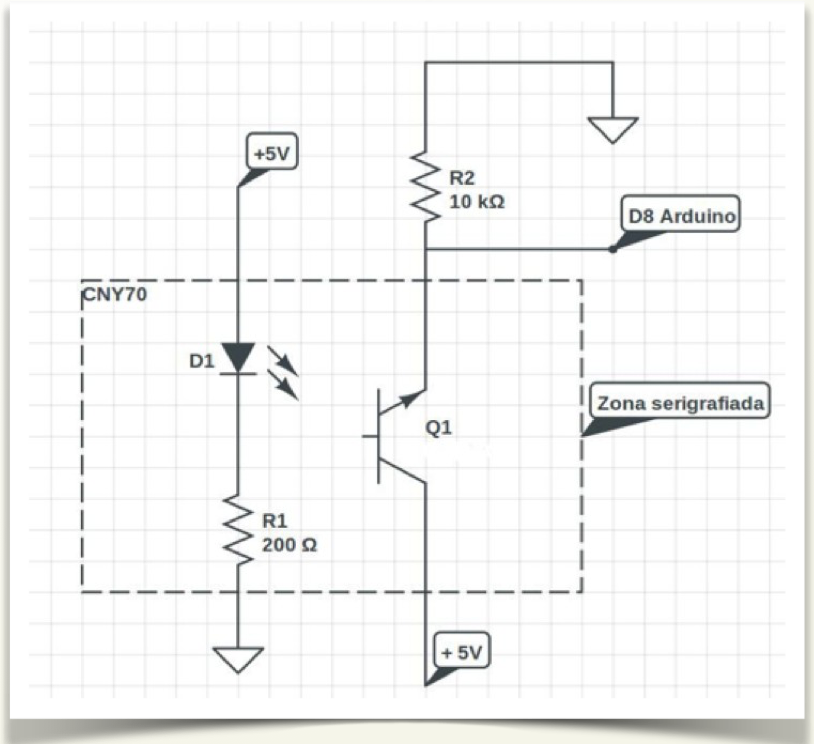
Detección de manchas (analógico). Por ejemplo, caso del sensor CNY70
Razona el algoritmo (contando manchas)
¿Cómo cuento las manchas?
Si entendiste bien lo que aprendiste en la tarea tres sobre variables... ¡Ya sabes la respuesta a esta pregunta!
¡Necesitaras una variable, obvio!
Procedimiento
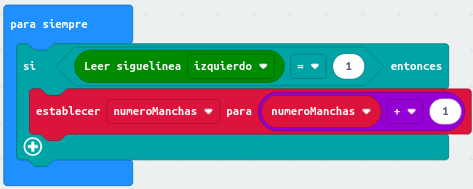
| Crea una variable y pone un nombre | Llámala numeroManchas. Al inicio establece a cero. | Añade uno a la variable numeroManchas cada vez que detecte una mancha |
|

|
|
| En principio puedo usar tantas como quiera o necesite. | Cuando una variable la establezco en su valor inicial al principio del programa se dice que la estoy inicializando. |
Cuando sumo un número fijo al valor que tenía la variable antes digo que la estoy incrementando. Si hago lo contrario (restar), la estoy decrementando. ¡OJO! Estas líneas de programa son muy básicas; el programa cuentamanchas necesitará seguramente más y mejor código. |
Consejos
Cómo trabajar
- Normalmente se trabaja en parejas o en pequeños grupos, con un robot y un ordenador para programarlo.
- Aunque tu compañero/a sea quien maneje el ordenador o el robot, intenta siempre entender lo que estáis programando o haciendo: las órdenes o bloques que se están usando, el tiempo que tardan en ejecutarse, el orden en el que se colocan los bloques en el programa...
- Compartir las ideas con los demás, colaborar en lograr el reto, no molestar a otros grupos si están probando o trabajando...
- Ten paciencia si tienes un sensor de infrarrojos que necesites calibrar con potenciómentro.
- Si no sale a la primera, no desanimarse. Es normal que haya que hacer varias pruebas hasta que salga.
Pistas
La clave para el éxito está en:
- Pensar siempre, a priori, qué estamos haciendo.
- Averiguar los bloques de programación necesarios.
- Deducir el diagrama de flujo ANTES de escribir el programa.
- Determinar muy bien cómo funcionan nuestros sensores de infrarrojos y calibrarlos adecuadamente.
- Haz las cosas paso a paso: no pasar al paso siguiente hasta no tener seguro el anterior.
Obra publicada con Licencia Creative Commons Reconocimiento No comercial Compartir igual 4.0